





|
|
| Tecnologie per Sistemi Amplificatori di Forza |
|
PARTNERSHIP
Progetto in Partnership con COSTRUZIONI MECCANICHE s.a.s. di L'Aquila, finanziato con Programma PIT - REGIONE ABRUZZO. OBIETTIVO Sviluppo di un dispositivo per la movimentazione di carichi. POSSIBILI UTILIZZI -Assistenza Assistenza ad ammalati (in ospedale) -Attività di protezione civile (soccorso in caso di catastrofi come terremoti) -Movimentazione di carichi in ambienti industriali (normativa impone 30 kg uomini 20 kg donne) SOLUZIONE PROPOSTA Sistema esoscheletrico, come una armatura, attivo, che può essere indossato dall’utilizzatore e che sia in grado di assecondarne le intenzioni nel movimentare carichi. ALTRE POSSIBILI RICADUTE DA UNA SIMILE TECNOLOGIA Sviluppo di dispositivi di ausilio per disabili ATTIVITA’ Sviluppo di un prototipo di ricerca per lo studio di soluzioni riguardanti: azionamenti (con cilindri pneumatici e valvole proporzionali in pressione) sistema di controllo (controller, sensori, strategia di controllo) |
PROTOTIPO
Un grado di libertà a livello dell’articolazione della spalla diverse configurazioni per lo studio di diverse modalità di lavorodell’attuatore Sensori ridotti al minimo: un sensore di forza all’interfaccia macchina-utilizzatore CONTROLLO L’utilizzatore è elemento centrale del controllo: definisce i riferimenti di forza (agendo sulla interfaccia con macchina) e velocità (decidendo a che velocità vuole andare) e controlla la velocità mediante i propri sistemi sensoriali visivo e propriocettivo. Il controllo della forza avviene ad opera di valvola proporzionale in pressione che garantisce nell’attuatore una pressione (e quindi una forza) proporzionale al segnale generato dall’azione dell’operatore. |
 Prototipo 1 GDL |
|
FUNZIONAMENTO
L’operatore movimenta un carico elevato in modo agevole. Avverte sempre la stessa frazione del carico che movimenta, mantiene una sensibilità sull’ambiente con cui interagisce -> movimentazioni precise. L’operatore è immediatamente capace di utilizzare la macchina, non ha bisogno di training. CARATTERIZZAZIONE DEL SISTEMA UOMO-MACCHINA Setup sperimentale in cui a monitor vengono visualizzati un segnale da inseguire e il segnale di inseguimento Il sistema è tanto migliore quanto più con elevati carichi si riesce ad inseguire bene il segnale |
Funzionamento
|
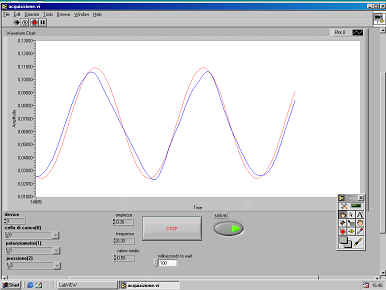 Inseguimento di una traiettoria sinusoidale |
