





|
|
| Ricerca |
|
Accoppiamento di Sottostrutture (Virtual Ptototyping)
Attuatori a Muscolo Pneumatico Attuatori in Leghe a Memoria di Forma (LMF) Bioingegneria Correzione (updating) del Modello EF Modifica Strutturale Robotica |
| Attuatori a Muscolo Pneumatico |
|
Il primo muscolo pneumatico fu brevettato negli anni ’50 sotto
il nome di muscolo McKibben e già negli anni ’60 fu applicato
in ricerche riguardanti arti artificiali. Il muscolo McKibben
è realizzato mediante un tubo in gomma rivestito con una rete
di fili molto rigidi e chiuso alle estremità con testate
metalliche. Mandando in pressione il tubo in gomma l’interazione
tra tubo e rete comporta un accrescimento diametrale ed un accorciamento del muscolo. Caratteristiche peculiari dei muscoli pneumatici sono: leggerezza, cedevolezza e comportamento fortemente non lineare. Un altro tipo di muscolo pneumatico è stato proposto da un gruppo di ricerca dell’Università di Varsavia. Il muscolo è realizzato mediante un tubo in gomma nella parete del quale sono annegati fili ad elevata rigidezza disposti nella direzione dell’asse del tubo stesso. Il tubo è chiuso con testate metalliche. Mandando in pressione il tubo in gomma si ha un accrescimento della dimensione diametrale e un contemporaneo accorciamento del muscolo. Per limitare le deformazioni diametrali vengono utilizzati anelli rigidi.
Presso l’Università de L’Aquila l’idea del muscolo a fibre
dritte è stata ripresa e sviluppata. E’ stato sviluppato un
modello agli elementi finiti per la simulazione del comportamento
del muscolo ed è stata messa a punto una procedura per il
dimensionamento rapido dei muscoli pneumatici a fibre dritte.
Inoltre è stata sviluppata una tecnologia per la realizzazione
dei muscoli. Infine è stato messo a punto un sistema di controllo
basato su logica Fuzzy per la movimentazione.
|
|

|
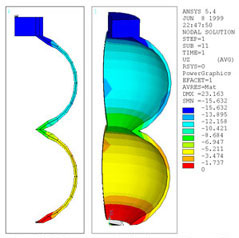
Modello Elementi Finiti
|
Il muscolo a fibre dritte
|
